Projects

C-AAM Turret Blaster Robot
October 2023
HackTX Hackathon - 1st Place
k.malhotra.cc/projects/2023/10/hacktx
- Brought together a team that designed a 2-axis turret blaster to shoot aggie maroon objects using computer vision in 24 hours
- Interfaced a laptop running OpenCV with an Arduino controlling stepper motors
- Used a software defined radio (SDR) to receive audio from a handheld radio, transcribe voice to text, and decide whether to activate the turret
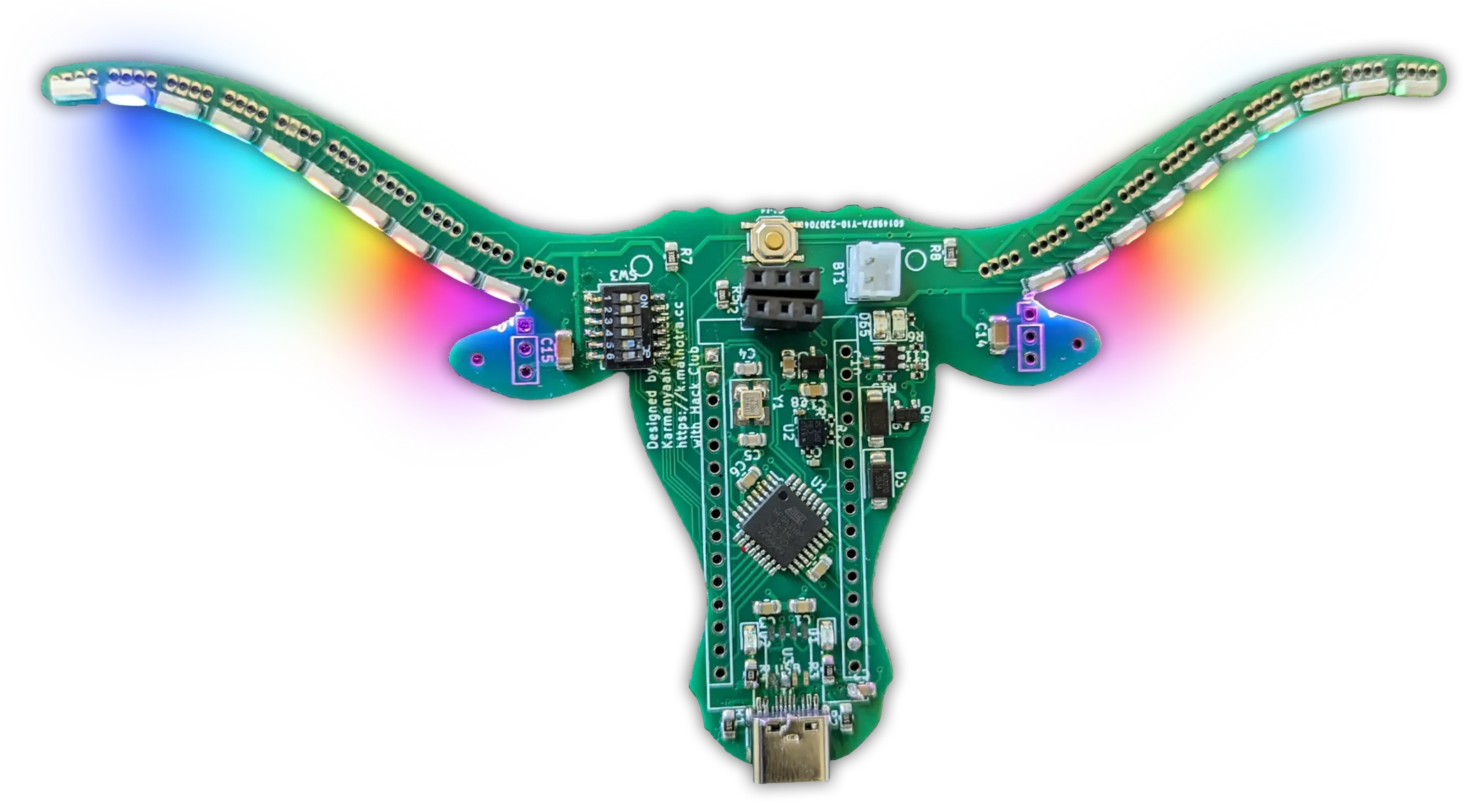
Longhorn LED Level PCB
k.malhotra.cc/projects/2023/09/sparkletilt
- Designed an ATmega328P-based, Arduino-compatible dev board, with inputs (accelerometer), outputs (Addressable LEDs), Li-ion charging, USB

Hot Dog - A Programmable Flamethrower
July 2023
Outernet Hackathon - Hack Club
k.malhotra.cc/projects/2023/09/hotdog
- Rapidly prototyped and developed a pyrotechnic toy in 42 hours from ideation to demo
- Collaborated with a team of 5 under time pressure to test various fuel dispensing mechanisms, user inputs, ignition, controls, and backup plans
- Built and coded a safe, Arduino-controlled, battery powered, motor driver and HVAC source
Discord - GroupMe Chat bridge
github.com/karmanyaahm/groupme_discord_bridge_v3
- Syncs messages between various data sources while appearing native to the platform
- Reliably operating for over 2 years on a Debian server with no maintenance